LABORATORY / EDUCATOR
Research
研究紹介
制御工学は時間と共に変化するシステムを取り扱う学問です。そして、特定のシステムを対象とするのではなく、様々なシステムを広く一般的に取り扱うことができます。
まだ実現されていない、複雑で新しいシステムを作るためには、システムの物理的な設計だけでなくその制御方法も同時に考えなければなりません。
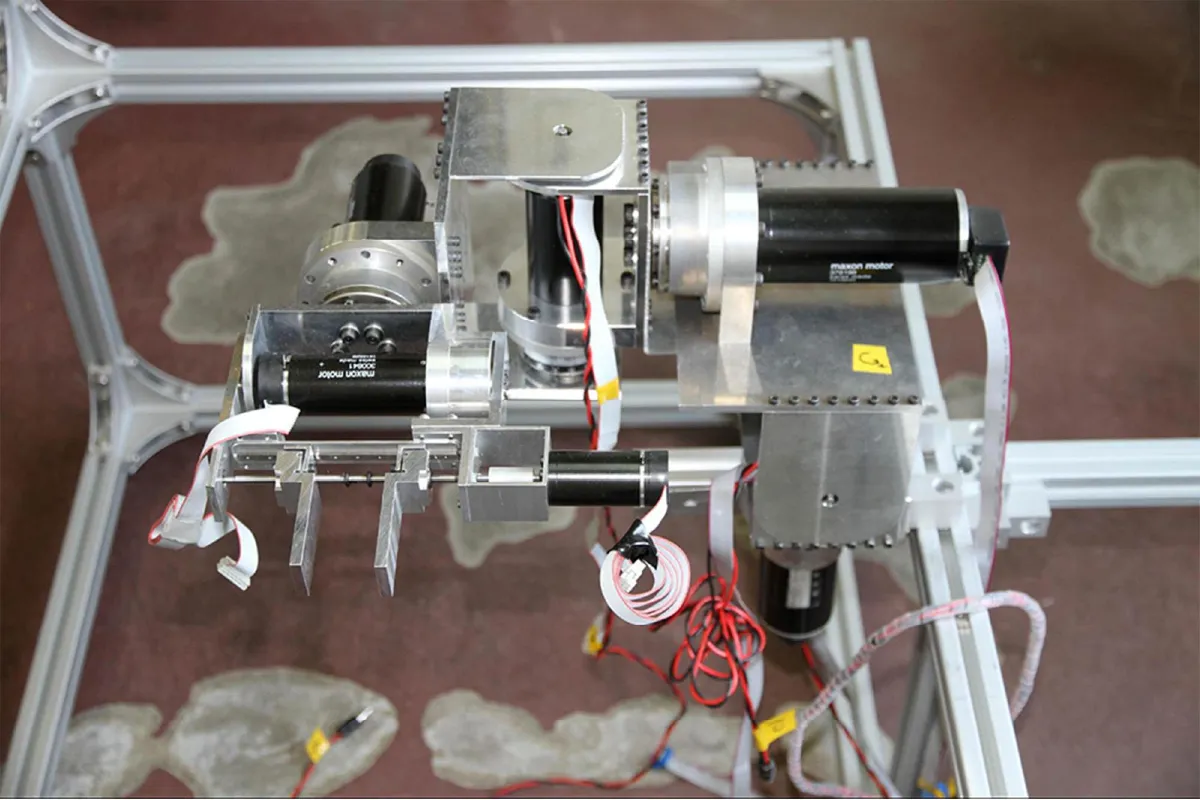
例えば、力制御に関する研究では、遠隔地にあるロボットマニピュレータの力をオペレータへ正確に伝え、あたかも実際に対象を操作しているかのような環境(仮想現実)を作る技術の研究を行っています。この時、ロボットアームとオペレータの操作部の構造と同時にその制御方法も設計するのです。
また、閉鎖生態系の研究では、宇宙ステーションの様な、閉鎖された空間で人間が長期間滞在するために、地球の様に食料の生産と空気や水といった全ての物質の循環を実現しようとしています。そのためには、まずシステムが安定になる条件を求め、そしてこれを実現するための装置や物質循環の制御方法を考えなければなりません。
この様に、制御工学は様々な新しいシステムを実現するための学問です。
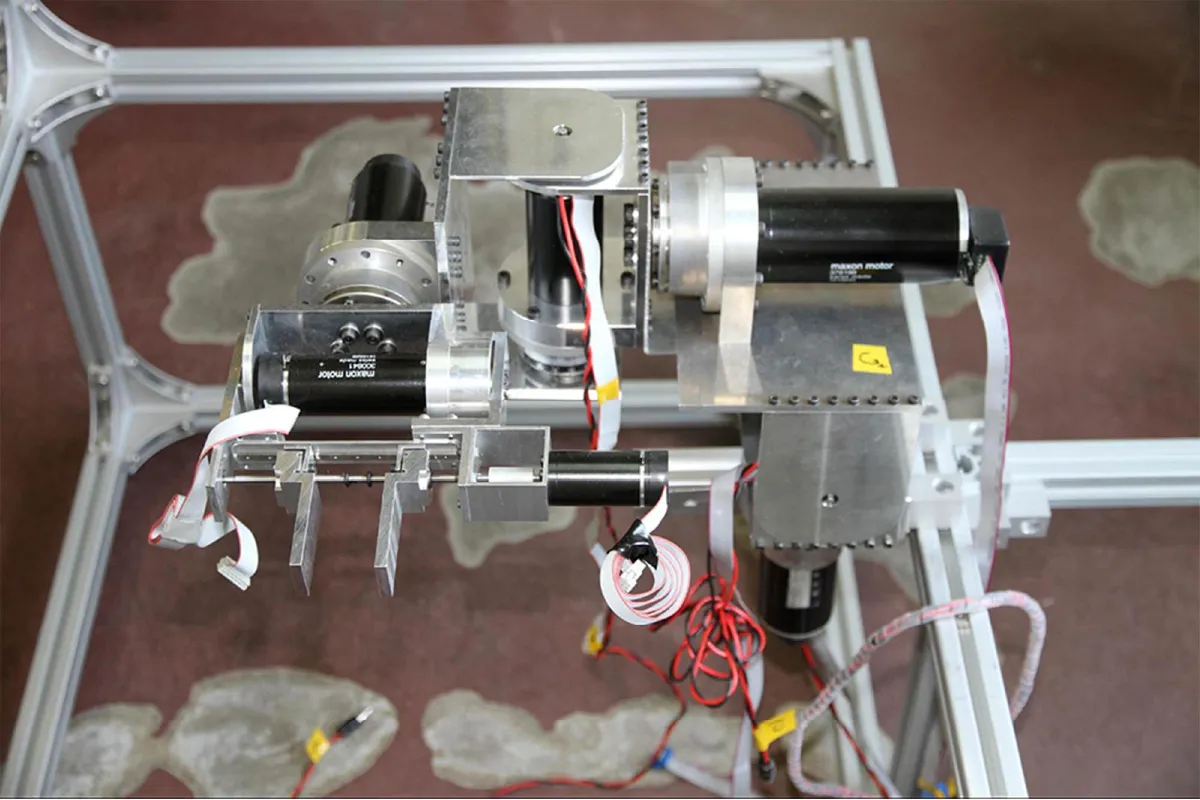
6自由度ロボットマニピュレータ
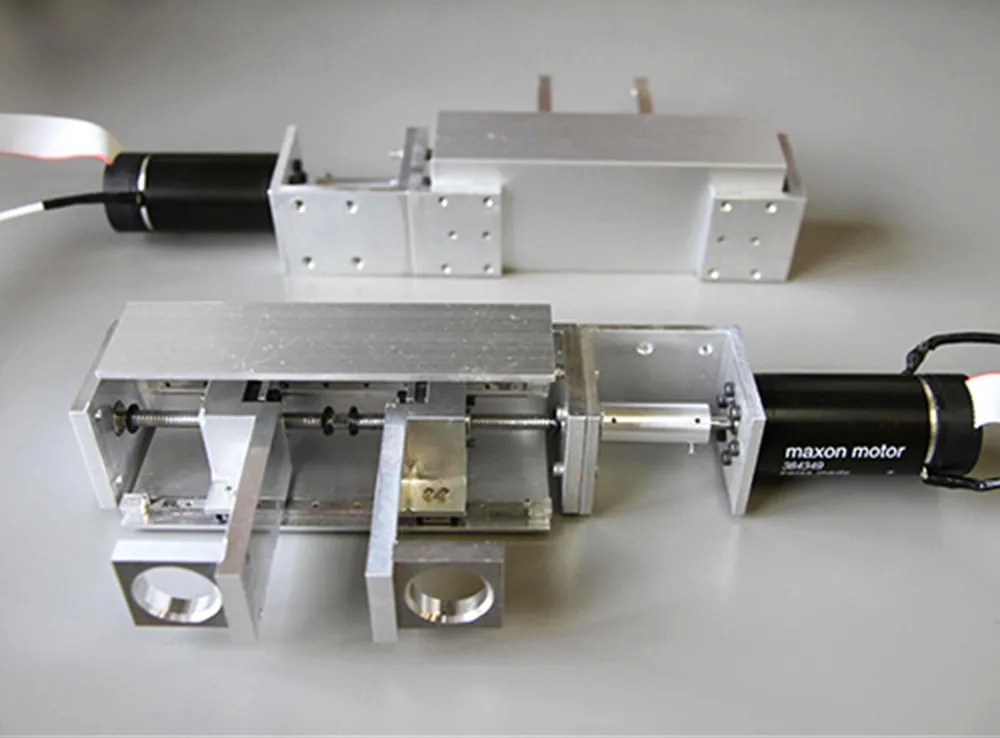
バイラテラル・マスタ・スレーブハンド
Educator

教員情報詳細
吉田 洋明教授
ダイナミクスを持つシステムの設計、解析、試作および実験を行う研究室です。
研究分野
機械力学・制御 / 知能機械学・機械システム / 制御工学
研究キーワード
計測・制御工学 / 力制御 / マスタ・スレーブシステム / サブオービタル宇宙機 / 閉鎖生態系 / 材料設計 / 最適化手法