制御・情報・ロボティクス系


知能化ロボット研究室
自律移動ロボットの研究
Educator

LABORATORY / EDUCATOR
Research
研究紹介
現在のロボットは生産現場から解放され、より身近な場所で利用される様になってきました。この様にロボットと人が共存する社会においては、誰でも安全に使えるロボットが必要になります。そこで私たちはロボットが自律して移動しながら生活を支援するための研究を行っています。
ロボットが生活空間で作業するには段差や階段が有っても移動できる必要があります。そのための移動機構として展開車輪を考案し実用化を目指しています。(写真1)また、障害物を判断し移動するための環境認識や移動経路生成に人工知能的な手法を用いて制御を行う研究や動作やモーションキャプチャして遠隔地の人とコミュニケーションを取れるロボット(写真2)の実現に向けて研究にも取り組んでいます。

(写真1)展開車輪ロボットの階段昇降
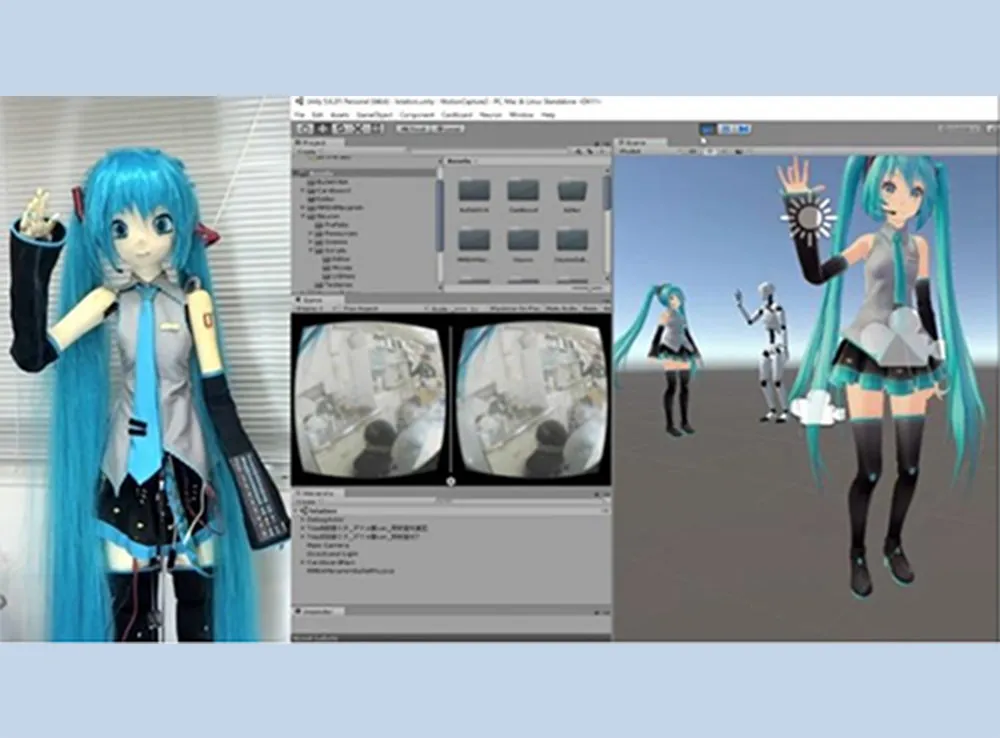
(写真2)モーションキャプチャによる遠隔地のロボットの制御
Educator
教員情報詳細
入江 寿弘教授
こだわりを持った仕事をしよう。
研究分野
ソフトコンピューティング / 知能ロボティクス / 機械力学・制御 / 知能機械学・機械システム / 電力工学・電気機器工学 / 計測工学
研究キーワード
無線LAN / 遠隔操縦 / 自律運転 / コミュニケーションロボット / 人工生命 / 歩行ロボット / 質点系 / ファジィ / マイクロ・エアー・ビークル / 画像処理
塩崎 雄晴助手
大いに学び、挑戦し、実りある学生生活を送ってください。