電気・電子・マイクロマシン系

ニューロロボティクス研究室
生物に学んでロボットに命を宿す研究
Educator
LABORATORY / EDUCATOR
Research
研究紹介
ロボット技術は世界中で研究されていますが、未だに生物を超える性能のロボットの実現には至っていません。特に生物の重要な器官である脳は、ほ乳類に比べて単純な昆虫でさえも、どのように五感を基に体を制御しているか明らかにされていません。また、生物がエサからエネルギーを得る方法や、筋肉によりエネルギーを運動に変換する仕組みも実現が難しいため、別の手段での代替が必要です。
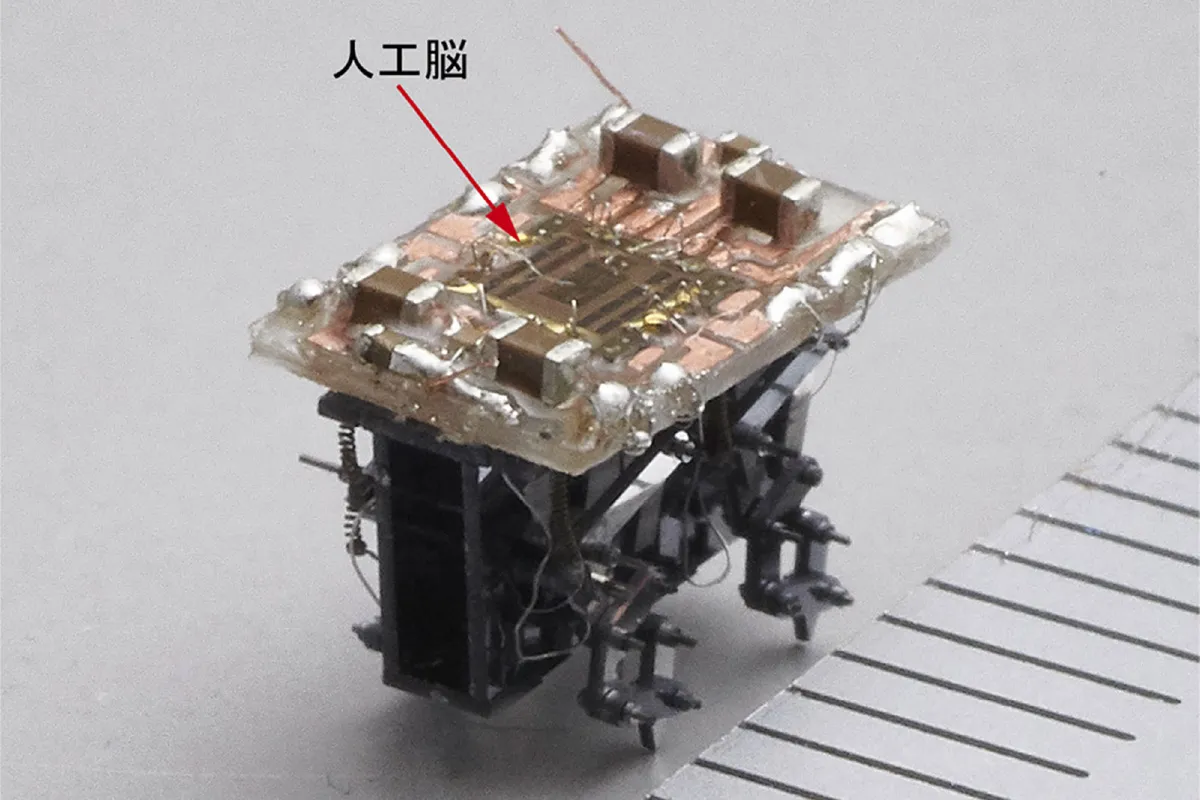
ニューロロボティクス研究室では、微小な電子回路および微小な機械を作製する技術を組み合わせて、ミリメートルサイズの人工生物を実現する研究を進めています。具体的には、生物の脳を構成するニューロンに学び、電気的な信号を生成する電子回路を作製し、コンピュータプログラムが不要な「人工脳」を研究しています。現在までに「人工脳」をミリメートルサイズのロボットに搭載し、蟻のような6足歩行を実現しました。また、静電気力を応用した微細なモータやセンサを開発し、ロボットの動力源や感覚入力に利用する研究も進めています。さらに、ミリメートルサイズの太陽電池をロボットのエネルギー源として搭載する研究もしています。微小な電気要素および機械要素を組み合わせて、世界最小の人工昆虫を実現することを目指しています。小型ロボットは医学部の目にとまり、小型ロボットを将来的に人間の体内で活躍できるようにする研究も始めました。他にも、生物を模倣したロボットの開発として、馬のように歩行をするロボットやねずみのように歩行するロボットも研究しています。生物が持つ無限大の可能性を工学的に応用することで、様々な分野に寄与できるように学生と研究に取り組んでいます。
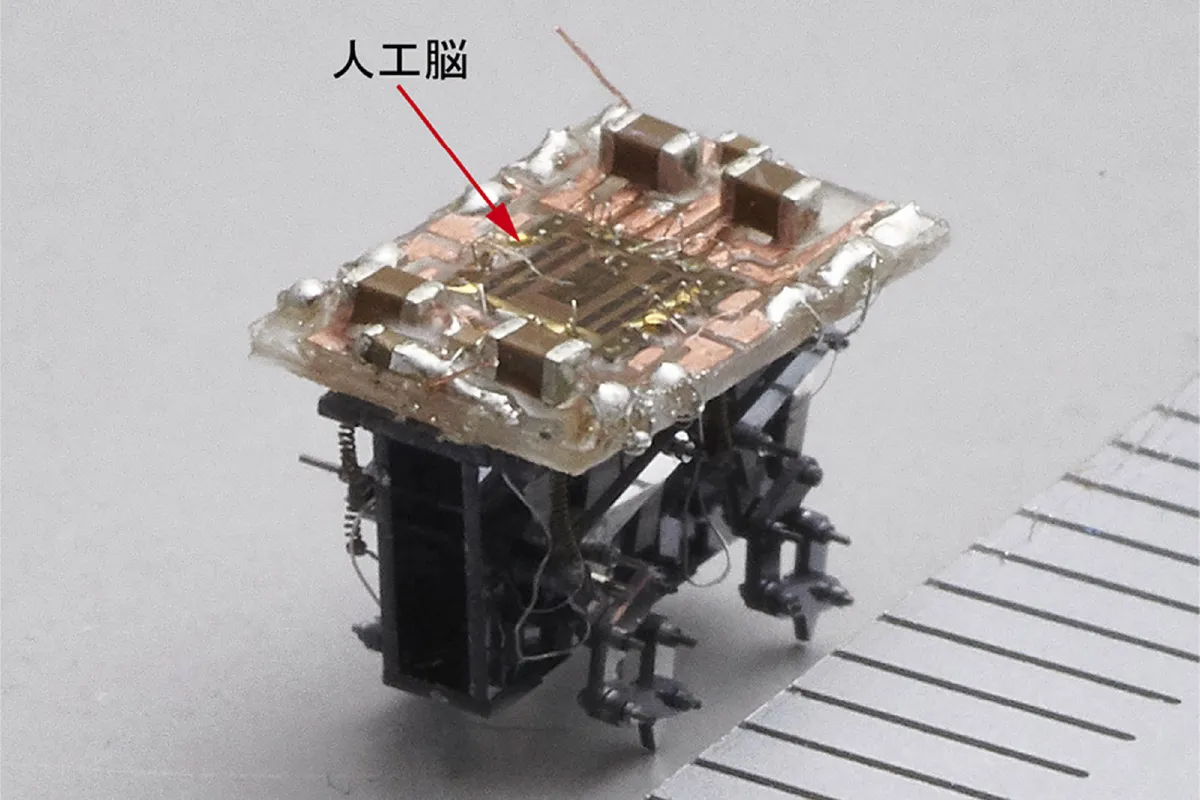
人工脳を搭載した世界最小の4足歩行ロボット
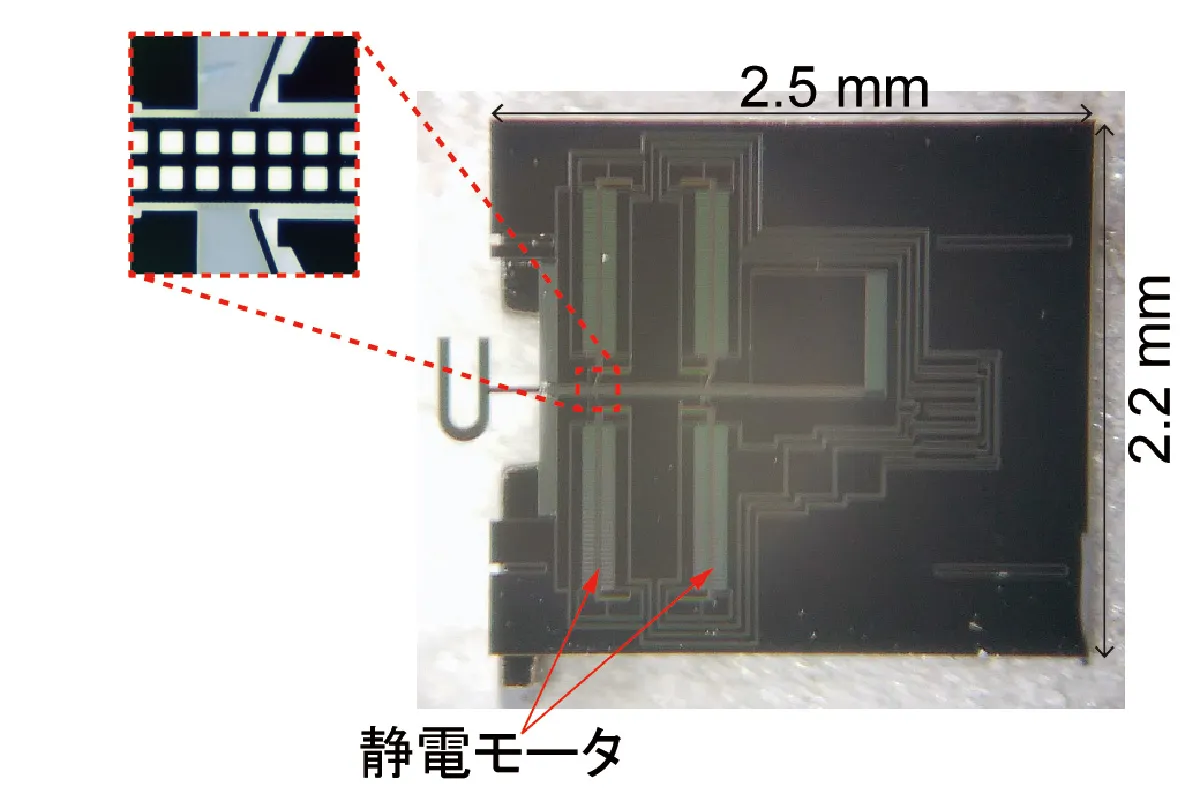
静電気力を応用した微細なモータ
Educator
教員情報詳細
齊藤 健教授
プログラム無しで動く次世代型のロボットで世界を驚かせたい学生を募集中です!
研究分野
電子デバイス・電子機器 / マイクロ・ナノデバイス / 知覚情報処理・知能ロボティクス
研究キーワード
ハードウェアニューロンモデル / ニューラルネットワーク / MEMS / マイクロロボット / パルス形ハードウェアカオスニューロンモデル / 非同期 / ハードウェア / 人工ニューラルネットワーク